Basic HTML Version


Control systems and automation
or external event. In any case, the exchange of data between devices
and PLC does not follow the rhythm set by the PLC’s CPU.
The Q-EIO Network
Unlike Ethernet systems from 10+ years ago, the Q-EIO system does
not encounter any collisions when transmitting data, due to full duplex
Ethernet and the use of switches instead of hubs. In essence, there
are no random or unpredictable delays in the system. Also, the Q-EIO
system employs a restricted architecture and QoS (Quality of Service)
to ensure that the delays encountered are minimised and able to be
calculated. QoS minimises delays and limits the delay to a known
maximum at each hop. The restricted architecture limits the number
of hops, hence limiting the maximum delay or jitter. The architecture
limitation, however, allows DIO devices to be connected in a control-
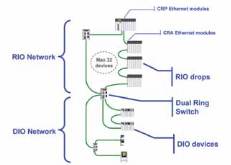
led way. Figure 2 shows a typical Q-EIO system architecture and its
principal components.
Figure 2:Typical Q-EIO Architecture.
Determinism
The deterministic nature of the Q-EIO system provides for the transfer
of I/O data over the Ethernet RIO network within a defined period of
time. For a network of maximum size, RIO I/O data will take at most
9 ms to be transferred across the Ethernet RIO network once it is
transmitted by either the remote input or output modules. Calculation
of this maximum network transmission time appears in the appendix.
However, the most important aspect of Q-EIO determinism is that
the performance level described above is maintained even in the pres-
ence of other non-RIO data in the network. This level of determinism
is achieved through careful implementation of new techniques in the
stabilisation of the transmission time, jitter management, Input and
Output data transfer, and proper response to data transmission failures.
TransmissionTime
An Ethernet packet transmitted by either the PLC or a remote rack
must pass through a number of hops before it reaches the other end
of the network, a hop is either a switch or an RIO drop connected in
the daisy chain or ring. Each hop will take a fixed time to transmit the
packet (determined by packet size). For a maximum sized Ethernet RIO
packet this time is 78 μs which translates into 2,496 ms for a Q-EIO
system of maximum size. Note that the maximum transmission time
for a complete system will be smaller for a smaller system; similar to
traditional fieldbus systems, the size of the systemwill affect the sys-
tem performance. However, in Q-EIO systems the time increase due
to a large system configuration will be much less than in a traditional
network. This effect is achieved through higher network speeds and
the ability for multiple devices to transmit at once.
Jitter
When Ethernet RIO data is transmitted it will not always be sent
when no other traffic is on the network, this occurs since all drops
in Q-EIO are independent and SCADA/HMI and Ethernet DIO traffic
is also present on the network. To allow Ethernet RIO traffic to pass
through the network within a guaranteed maximum time (to ensure
determinism) multiple systems are employed:
• Full duplex Ethernet
• Line rate switches
• Limitation on the network structure and number of devices
• QoS
Full duplex Ethernet and line rate switches allow for traffic in both
directions on a cable at the same time while line rate switches allow
traffic to flow on all ports of a switch at the same time with no delays.
The limitation on the network structure and size restricts the number
of devices that will be transmitting data and the number of points on
the network where SCADA/HMI or Ethernet DIO traffic can enter the
network, as seen in the next paragraphs each point where SCADA/HMI
or Ethernet DIO enters the network is a source of jitter. QoS is imple-
mented to ensure that all Ethernet RIO traffic is transmitted through the
network ahead of any SCADA/HMI or Ethernet DIO traffic. All non- RIO
traffic is assigned a lower priority automatically by the system. Since
QoS is enforced at each switch, an Ethernet RIO packet will be passed
through the switch to the next hop before any other pending SCADA/
HMI or Ethernet DIO traffic that is waiting at that hop. This leaves only
two items that can delay an Ethernet RIO packet at a hop:
• A SCADA/HMI or Ethernet DIO packet that is already in the process
of being transmitted.
• Another Ethernet RIO packet that is being transmitted.
The impact of these two types of delays is well understood, and the
maximum effect can be easily calculated, as shown in the appendix.
A
bbreviations
CPU - Central Processing Unit
DIO - Distributed I/O
HMI - Human Machine Interface
I/O - Input/Output
MAST - Monitoring and Support Time
PLC- Programmable Logic Controller
QoS - Quality of Service
RIO - Remote I/O
RPI - User-configured Polling Rate
SCADA - Supervisory Control and Data Acquisition
T
ake note
• Ethernet can be deterministic.
• A highly deterministic network need not necessarily be inflexible.
• New technologies are being continually incorporated into the Ethernet
environment to make it even better suited to the industrial environment.
5
September ‘12
Electricity+Control